Transforming a head direction signal into a goal-oriented steering command
science-easyview
머리 방향 신호를 목표지향적인 조향 명령으로 변환하는 것
Abstract
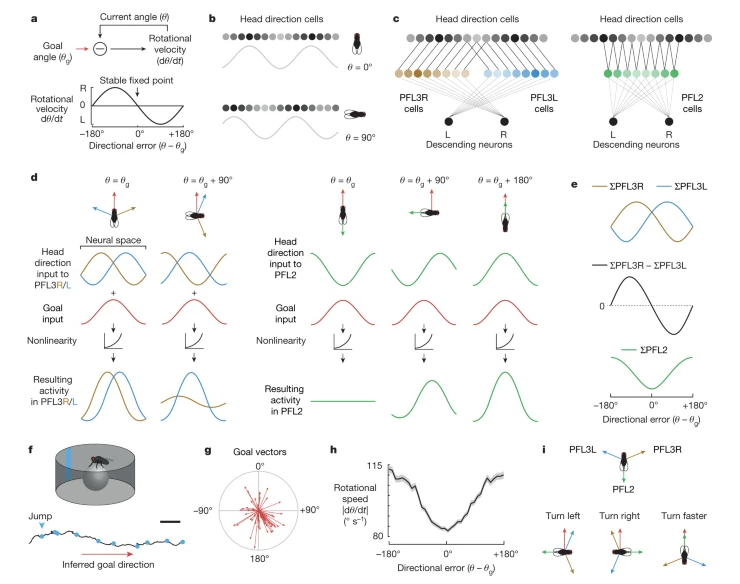
항해를 하기 위해서는 우리가 향하는 방향을 지속적으로 추정하고, 목표에서 벗어난 편차를 수정해야 합니다. 방향 추정은 머리 방향 시스템의 링 유인체 네트워크를 통해 이루어집니다. 그러나 방향 감각이 행동을 지도하는 방법을 우리는 완전히 이해하지 못합니다. 초파리 연결체 분석은 머리 방향 시스템과 운동 시스템을 연결하는 세 개의 세포 집단(PFL3R, PFL3L, PFL2)을 밝혀냈습니다. 여기서 우리는 항해 중 이미징, 전기생리학, 화학유전학적 자극을 사용하여 이러한 집단이 어떻게 기능하는지 보여줍니다. 각 집단은 머리 방향 벡터의 이동된 복사본을 받아, 그들의 세 참조 프레임이 서로 대략 120°씩 이동되어 있습니다. 각 세포 유형은 그 자신의 머리 방향 벡터와 공통 목표 벡터를 비교합니다; 구체적으로, 비선형 변환을 통해 이 벡터들의 일치성을 평가합니다. 모든 세 세포 집단의 출력은 이후 운동 명령을 생성하기 위해 결합됩니다. PFL3R 세포는 파리가 목표의 왼쪽으로 향할 때 동원되며, 그들의 활동은 우측으로의 회전을 유도합니다; PFL3L에 대해서는 반대가 사실입니다. 한편, PFL2 세포는 조타 속도를 증가시키며, 파리가 목표에서 멀리 떨어져 있을 때 동원됩니다. PFL2 세포는 방향 오류가 증가함에 따라 조타 강도를 적응적으로 증가시켜, 속도와 정확성 사이의 균형을 효과적으로 관리합니다. 함께, 우리의 결과는 뇌 속 공간의 지도가 내부 목표와 결합되어 세계 중심 좌표에서 신체 중심 좌표로의 변환을 통해 행동 명령을 생성하는 방법을 보여줍니다.