Entorhinal corte는 CA1 representation의 학습 관련 변화를 지시한다.
Abstract
뇌 활동의 학습 관련 변화는 적응 행동의 기초가 되는 것으로 생각된다. 예를 들어, rodents에 의한 보상 사이트 학습은 hippocampus에서 그 위치를 over-representation하는 것을 필요로 한다. 이러한 학습 관련 변화가 어떻게 발생하는지는 알려지지 않은 채로 남아 있다. 여기서 우리는 쥐가 linear treadmill에서 보상 위치를 학습하면서 hippocampal CA1 population activity를 기록했다. 생리학 및 약리학적 증거는 adaptive over-representation이 behavioural timescale synaptic plasticity (BTSP)7을 요구했음을 시사한다. BTSP는 우리가 제안한 dendritic voltage signal에 의해 구동되는 것으로 알려져 있다. 따라서, EC3 활성의 광유전적 억제에 의해 CA1 over-representation이 크게 제거되었다. EC3 뉴런의 기록은 BTSP가 over-representation을 생성하도록 지시하는 지시적 신호를 제공할 수 있는 활동 패턴을 보여주었다. 이 기능과 일관되게, 우리의 관찰은 두드러진 reward-predictive cue를 가진 두 번째 환경에 대한 노출이 보상보다 큐에서 더 높아진 EC3 활동과 CA1 장소 필드 밀도를 모두 초래했다는 것을 보여준다. 이러한 데이터는 해마의 학습 관련 변화가 환경의 행동 관련 기능에 특별히 적응된 것으로 보이는 EC3의 지시적 신호에 의해 지시된 synaptic plasticity에 의해 생성된다는 것을 나타낸다.
Figure
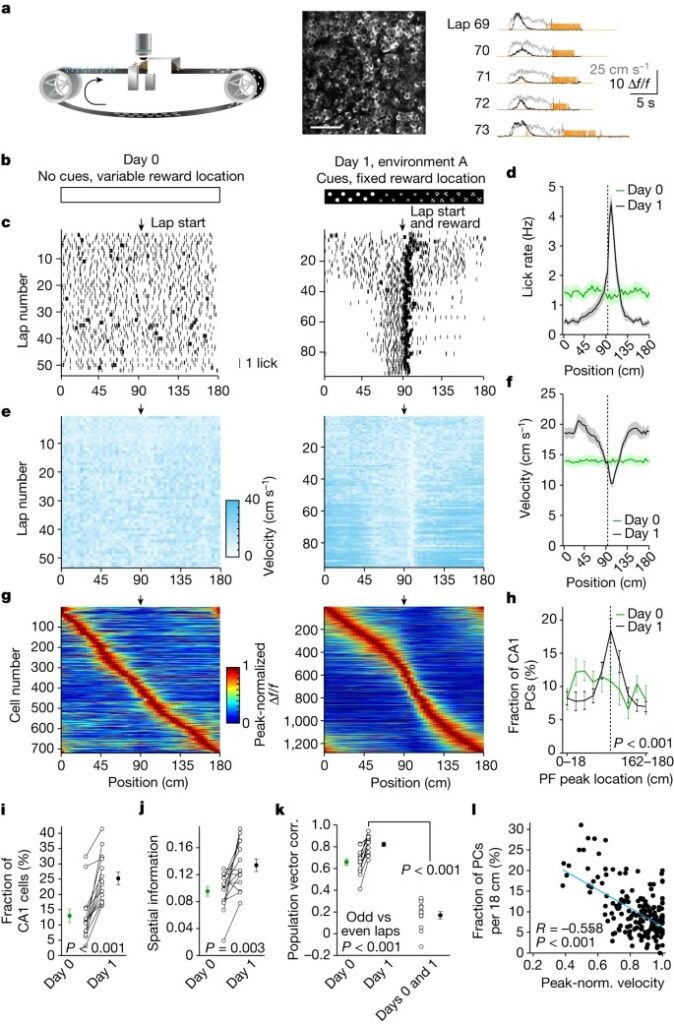
Fig. 1: CA1 representation에서 Experience-dependent 변화
a, (왼쪽) 생쥐가 water reward의 위치를 학습하는 실험 설정. (중간) 단일 동물의 등 CA1 pyramidal neuron에서 GCaMP6f 발현을 보여주는 대표적인 time-averaged two-photon image. (오른쪽) CA1 place cell에서 Δf/f 추적 (검은색), 속도(회색) 및 핥기 신호 (주황색).
b, 작업 단계 (왼쪽) day 0은 최종 거주일(보상 위치가 가변적인 빈 벨트). (오른쪽) 첫째 날, 새로운 환경에 대한 노출(보상 위치가 고정된 큐가 풍부한 벨트, 즉 환경 A).
c, 개별 동물의 핥기 행동. 화살표는 랩 시작(왼쪽) 또는 랩 시작 및 보상 위치(오른쪽)를 나타냄.
d, days 0 and 1의 평균 핥기 비율.
e, 개별 동물의 달리기 행동.
f, days 0 and 1의 평균 달리기.
g, 모든 CA1 place cell에 대해 공간 전체에 걸친 Peak-normalized 평균 Δf/f.
h, CA1 place cells (PC) 대 place field (PF) 피크 위치.
i, spatially modulated place cell의 비율.
j, 동물당 평균 place cell spatial information.
K, Population vector correlation. (왼쪽) CA1 place cell activity의 신뢰성. (오른쪽): days 0 and 1에 place field가 있는 CA1 셀에 대한 모집단 벡터 상관 관계.
l, peak-normalized velocity function으로서 day 1 CA1 place cell density와 선형 방정식.
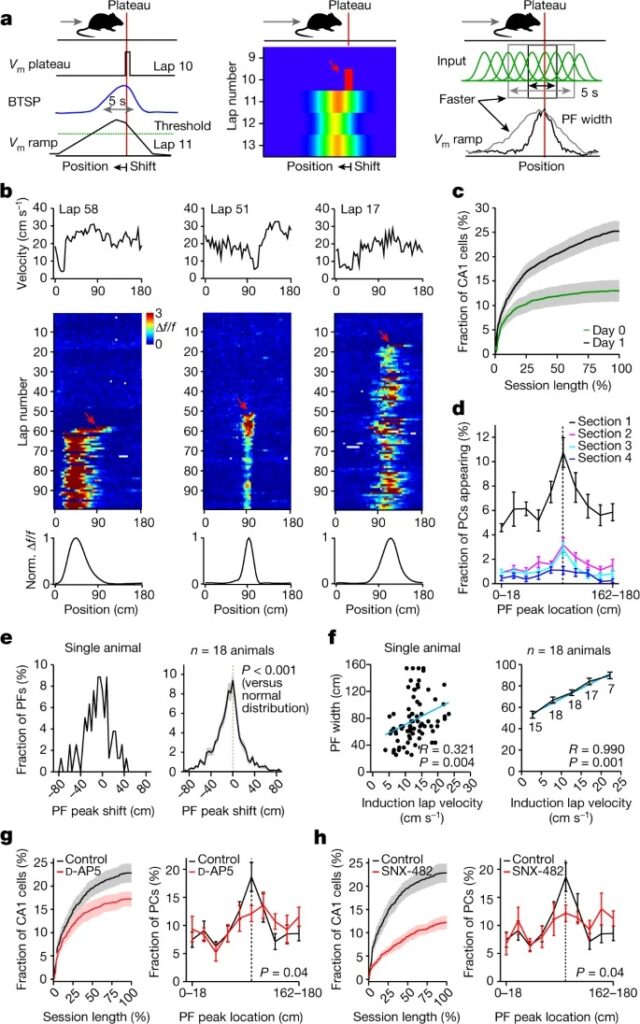
Fig. 2: BTSP는 CA1 representation의 experience-dependent shaping의 기초가 된다.
a, BTSP의 특징을 보여주는 도식.
b, 갑자기 나타난 3개의 place cell. (상단) place field activity가 있는 첫 번째 랩의 속도 프로필(‘induction lap’) (중간) Δf/f across lap. (하단) Δf/f across space 평균 peak-normalized (norm.)
c, days 0 (녹색)와 days 1 (검은색) CA1 CA1 place cell appearance의 Time course.
d, place field peak location과 세션 길이의 함수로서 CA1 place cell의 Fraction.
e, place field peak shift를 나타내는 히스토그램. (왼쪽) 개별 동물. (오른쪽) n = 18 동물.
f, 동물의 평균 유도 랩 속도의 함수로서 Place field width. (왼쪽) 개별 동물. (오른쪽): n = 18 동물.
g, N-methyl-D-aspartate receptor길항제인 D-AP5(50 또는 75 μM)가 CA1 representation의 발달에 미치는 영향.
h, Ca2+ 채널 길항제 SNX-482(10 μM)의 효과.
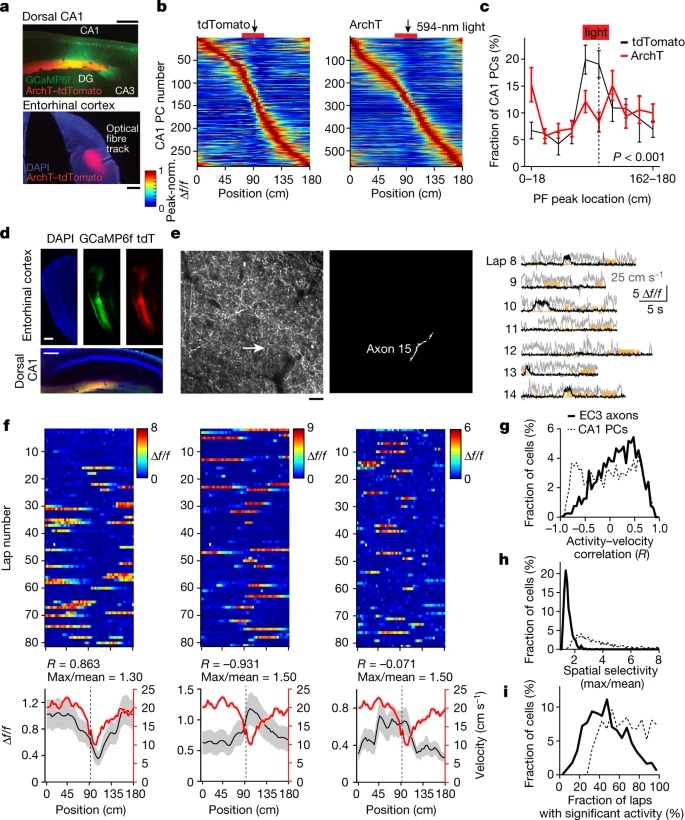
Fig. 3: CA1 representation의 experience-dependent shaping을 위해서는 EC3 activity가 필요.
a–c, EC3 neuronal activity의 Ips 측광학적 perturbation은 reward over-representation의 개발을 금지한다.
a, (상단) CA1에서 GCaMP6f의 바이러스 발현과 (하단) EC3에서 ArchT-td Tomato의 바이러스 발현.
b, 모든 CA1 place cell에 대해 공간 전체의 Peak-normalized 평균 Δf/f.
c, place field peak location의 함수로서 CA1 place cell의 비율.
d-i CA1의 lacunosum-moleculare 층에서 EC3 축삭 활성의 기록.
d, EC3 뉴런(상단)에서 GCaMP6f와 tdTomato(tdT)의 바이러스 발현과 n = 1 동물의 hippocampal area CA1 (하단)에서 axon을 보여주는 대표적인 이미지.
e, (왼쪽) representative two-photon, time-averaged image로 단일 동물에서 EC3 axon에서 GCaMP6f의 발현.
f, 세 개의 개별 EC3 axon. (상단) Δf/f across lap. (아래) 평균 Δf/f(검은색)와 평균 속도(빨간색).
g-i, 7동물(실선)의 792개 axons, 18동물로부터 1,727 CA1 place cell (Dashed line)의 activity–velocity correlation(g), 공간 선택성 지수(h), 유의미한 활동이 있는 랩의 분율 분포(i)의 분배,
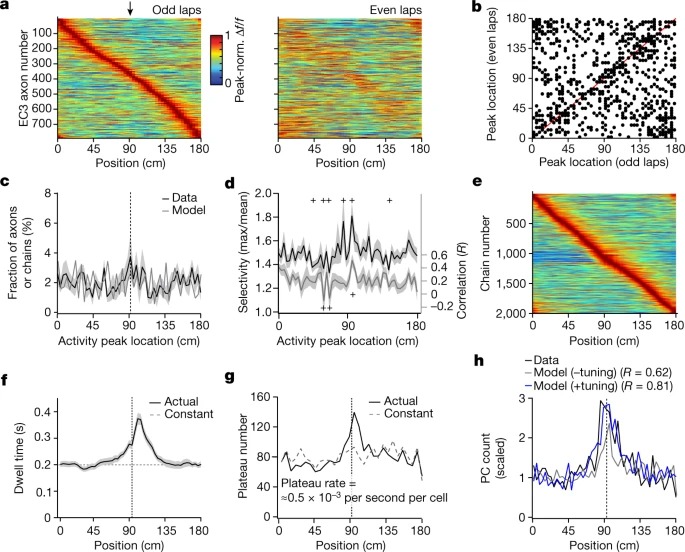
Fig. 4: CA1 representation을 형성하는 EC3 activity 요소.
a, 기록된 모든 EC3 axon에 대한 공간 전체의 Peak-normalized 평균 Δf/f.
b, 홀수 및 짝수 랩으로 이루어진 평균에 대한 축삭 활성 피크 위치를 보여주는 Scatter plot.
c, 활동 피크 위치의 함수로써 EC3 axon과 체인의 비율.
d, 공간 전체에 대한 EC3 axon 튜닝(검은색) 및 axon 당 홀수 짝수 랩 상관 관계(회색).
e: 모델링된 2,000개 마르코프 체인에 대한 정렬된 Peak-normalized 평균 활동
f, n = 18개 동물에 대한 평균 체류 시간 프로필(검은색).
g, 공간 전체에서 관찰된 임계값 교차(치상 고원 전위)의 수 예측.
h, CA1 스케일링된 place cell 수.
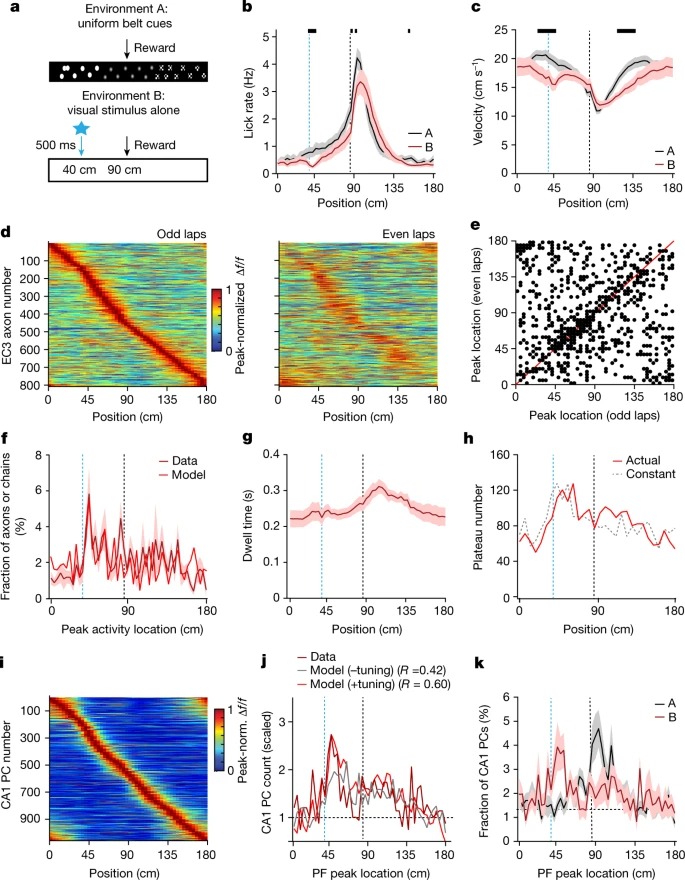
Fig. 5: EC3 activity는 환경에 적응한다.
a, 환경 A(상단)와 대조적으로 환경 B(하단)는 단일 고정 보상(검은 화살표)보다 50cm 앞에 빈 벨트와 시각적 자극(청색 발광 다이오드 점멸, 10Hz, 500ms)을 포함한다.
b, 환경 A(검은색)와 B(마룬)의 평균 핥기율.
c, 환경 A(검은색)와 환경 B (마룬)에서 실행되는 평균 달리기 프로필.
d, 환경 B에서 EC3 axon에 대한 공간 전체의 Peak-normalized 평균 Δf/f.
e, 홀수 및 짝수 랩에서 만들어진 평균에 대한 축삭 활동 피크 위치를 보여주는 Scatter plot.
f, 모든 EC3 축(마룬, 솔리드) 및 모델링된 Markov chain (빨간색)의 피크 활동 위치 히스토그램.
g, n = 9 동물의 평균 체류 시간 프로필.
h, 이 모델은 관찰된 임계값 교차(비판적 고원)의 수를 예측.
i, 환경 B의 모든 CA1 place cell에 대한 공간 전체의 Peak-normalized 평균 Δf/f.
j, Scaled CA1 place cell count.
K, 배치 필드 피크 위치의 함수로써 CA1 place cell 비율.
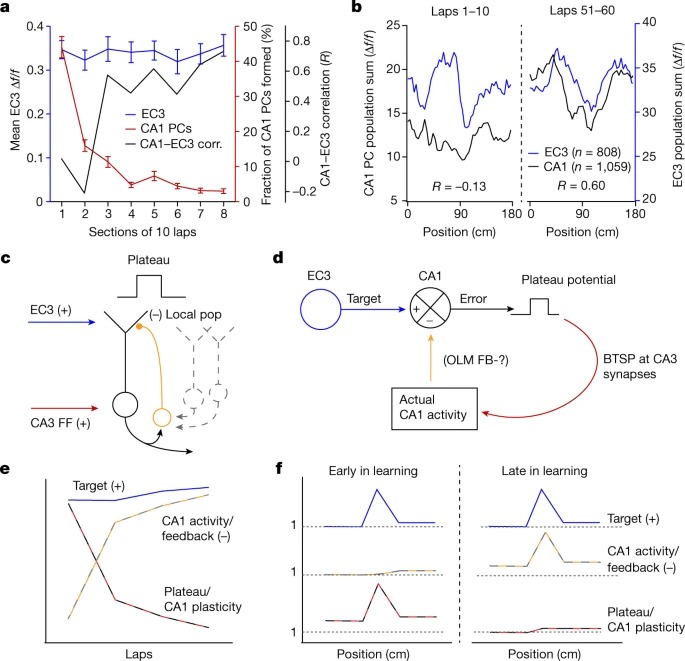
Fig. 6: EC3는 CA1 population activity에 대한 target signal을 제공한다.
a, 처음 8개 세션 섹션에 대한 over-representation (파란색), 형성된 CA1 place cell의 비율(마룬) 및 summed EC3 and CA1 population activity간의 상관 관계(검은색)의 평균 EC3 Δf/f
b, 1~10랩(왼쪽) 및 51~60랩(오른쪽)동안 환경 B에서 summed EC3(파란색) 및 CA1(검은색) population activity.
c-f, CA1에서 학습을 위한 제안된 네트워크 체계.
c, 관련 CA1 회로 요소에서 학습을 위한 제안된 네트워크 계획에는 CA1 pyramidal neuron (검은색 고체 및 회색 점선), distal apical tuft region을 관장하는 EC3로부터의 흥분 입력(파란색), perisomatic region을 관장하는 학습 중에 시냅스 가중치가 조정되는 CA3로부터의 excitatory feedforward (FF) 입력(빨간색), oriens lacunosum-petcular 피드백 억제성 intereuron은 regional population (pop)의 copy를 가져온다.
d EC3는 각 개별 CA1 뉴런에 distal apical dendrite에서 oriens lacunosum-molecularare (OLM) 피드백(FB)에 의해 제공될 수 있는 실제 population activity 패턴의 표현과 비교되는 원하는 또는 target activity 패턴을 제공한다.
e, 제안된 신호의 Temporal profiles.
f, 제안된 신호의 Spatial profiles.
conclusion
이 연구는 포유류의 뇌에서 학습의 기초가 되는 신경 메커니즘이 무엇인지에 대한 오랜 문제를 다룬다. 과거에, 우리는 EC3 입력의 광유전적 억제가 CA1 세포에서 plateau potential initiation을 감소시킨다는 것을 관찰했다. 이전에 제시된 상당한 데이터가 있는데, 이는 plateau potential이 BTSP와 장소 필드 형성을 유도한다는 것을 보여준다. 마지막으로, 우리는 이제 EC3 입력의 억제가 place field 형성을 줄이고 CA1 representations의 experience-dependent shaping을 변경한다고 보고한다. 모든 증거를 고려할 때, 우리는 EC3 활동이 CA1 뉴런의 plateau potential을 유도하여 BTSP를 통해 새로운 place field 형성을 유도하고 이것이 CA1 population activity의 학습 관련 변화가 발생하는 주요 메커니즘이라고 결론짓는다. 위에 제시된 몇 가지 증거는 EC3가 BTSP가 특정 원하는 CA1 population activity를 달성하도록 지시하는 표적과 같은 지시 신호로 기능한다는 것을 시사한다. 특히, 이 EC3 목표와 같은 활동은 균일성에 따라 다양했던 두드러진 환경 단서의 분포를 반영했다. EC3 뉴런이 어떻게 환경적으로 특정한 지시적 신호를 생성할 수 있는지를 정확하게 결정하기 위해서는 추가 실험이 필요하다.
목표 신호는 지역 활동과 원하는 행동 사이에 있는 다수의 다운스트림 매개 변수를 설명하는 수단을 제공하기 때문에 이론적으로 복잡한 신경 네트워크에서 학습을 지시하는 데 상당히 강력할 수 있다. 그러나 synaptic plasticity를 유발하는 표적 신호에 대한 보고는 헤비안 또는 그 밖의 다른 보고는 드물다. 실제로, 지도 운동 학습을 사용하는 것으로 생각되는 뇌 영역에서도 목표가 아닌 오류 신호를 사용하는 것으로 밝혀졌다. 표적 신호를 적응시킴으로써 지시되는 시냅스 가소성이 공간 학습과 에피소드 기억에서 중요한 것으로 잘 알려진 영역인 포유류 hippocampus의 활동을 형성한다는 관찰은 많은 뇌 영역이 현재 생각과 실질적으로 다른 방식으로 학습할 가능성을 제기한다.